1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
| class ResNet(nn.Module):
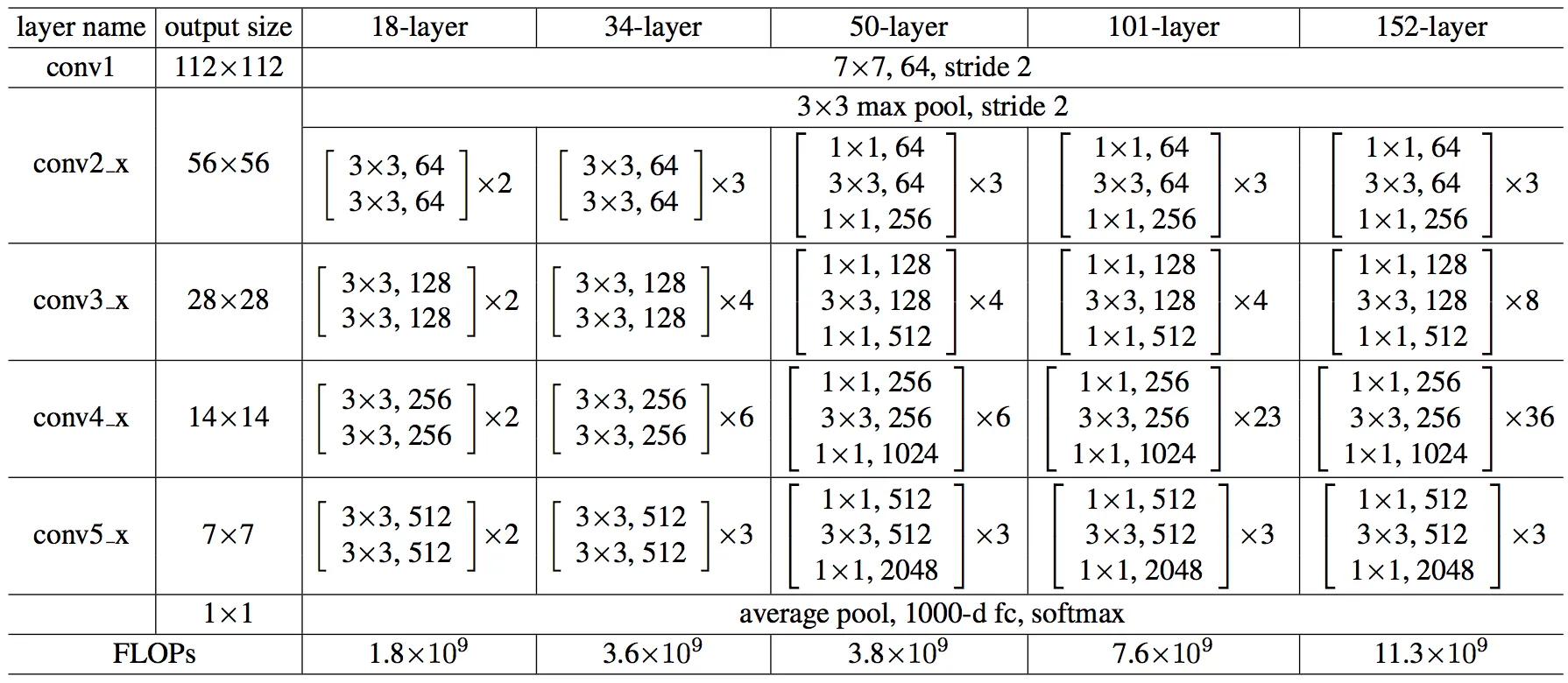
arch_settings = {
18: (BasicBlock, (2, 2, 2, 2)),
34: (BasicBlock, (3, 4, 6, 3)),
50: (Bottleneck, (3, 4, 6, 3)),
101: (Bottleneck, (3, 4, 23, 3)),
152: (Bottleneck, (3, 8, 36, 3))
}
def __init__(self,
depth: int,
num_stages: int = 4,
strides: Sequence[int] = (1, 2, 2, 2),
dilations: Sequence[int] = (1, 1, 1, 1),
out_indices: Sequence[int] = (0, 1, 2, 3),
style: str = 'pytorch',
frozen_stages: int = -1,
bn_eval: bool = True,
bn_frozen: bool = False,
with_cp: bool = False):
super().__init__()
if depth not in self.arch_settings:
raise KeyError(f'invalid depth {depth} for resnet')
assert num_stages >= 1 and num_stages <= 4
block, stage_blocks = self.arch_settings[depth]
stage_blocks = stage_blocks[:num_stages]
assert len(strides) == len(dilations) == num_stages
assert max(out_indices) < num_stages
self.out_indices = out_indices
self.style = style
self.frozen_stages = frozen_stages
self.bn_eval = bn_eval
self.bn_frozen = bn_frozen
self.with_cp = with_cp
self.inplanes: int = 64
self.conv1 = nn.Conv2d(
3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.res_layers = []
for i, num_blocks in enumerate(stage_blocks):
stride = strides[i]
dilation = dilations[i]
planes = 64 * 2**i
res_layer = make_res_layer(
block,
self.inplanes,
planes,
num_blocks,
stride=stride,
dilation=dilation,
style=self.style,
with_cp=with_cp)
self.inplanes = planes * block.expansion
layer_name = f'layer{i + 1}'
self.add_module(layer_name, res_layer)
self.res_layers.append(layer_name)
self.feat_dim = block.expansion * 64 * 2**(
len(stage_blocks) - 1
|